みなさんこんにちは!
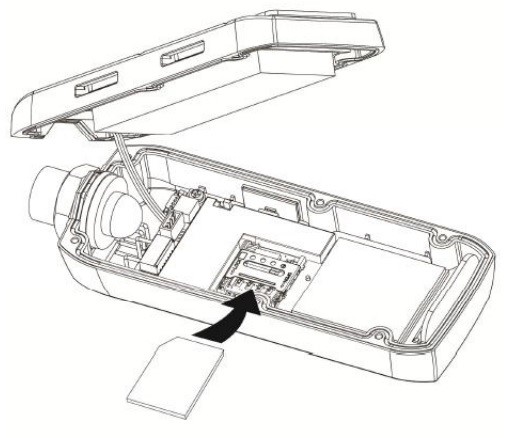
車両用LTE-M/GPSトラッカーのGTR-388LTE-Mの機能についてご紹介します。
GTR-388LTE-Mでしばしばお問い合わせいただく内容に「車のエンジンのオン・オフに連動してGTR-388LTE-Mの電源をオン・オフさせることは可能なのか」というものがあります。結論から言いますと可能です!この記事ではその設定内容や、実際の挙動についてご紹介します。
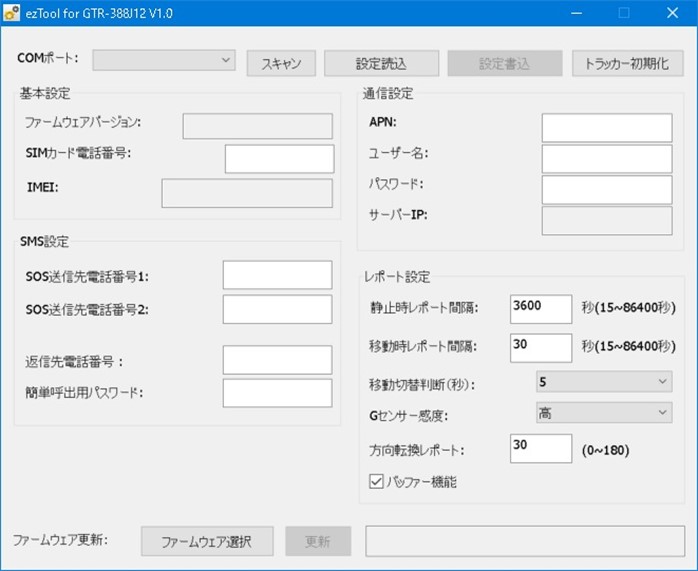
【前回のトピック】でご紹介しました通り、GTR-388LTE-Mでは詳細な設定変更が可能です。簡単な設定の変更であればezToolが便利ですが、詳細な設定を変更する場合は「ConfigTool」をご利用いただけます。
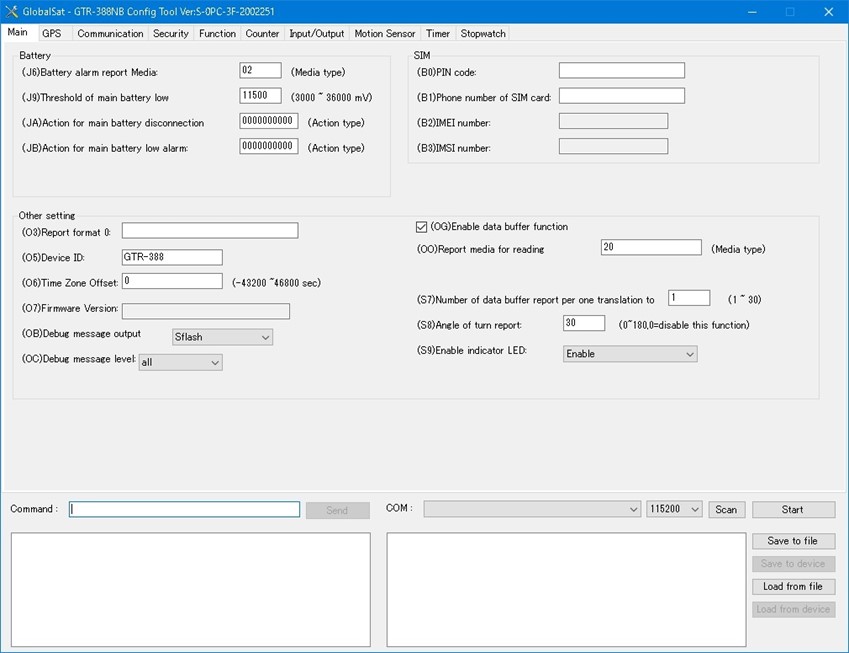
ConfigToolのメイン画面
ConfigToolは一般には配布しておりませんので、ご希望の方はお問い合わせください。ezToolと異なり英語表記になるほか、ezToolよりは操作が複雑になります。
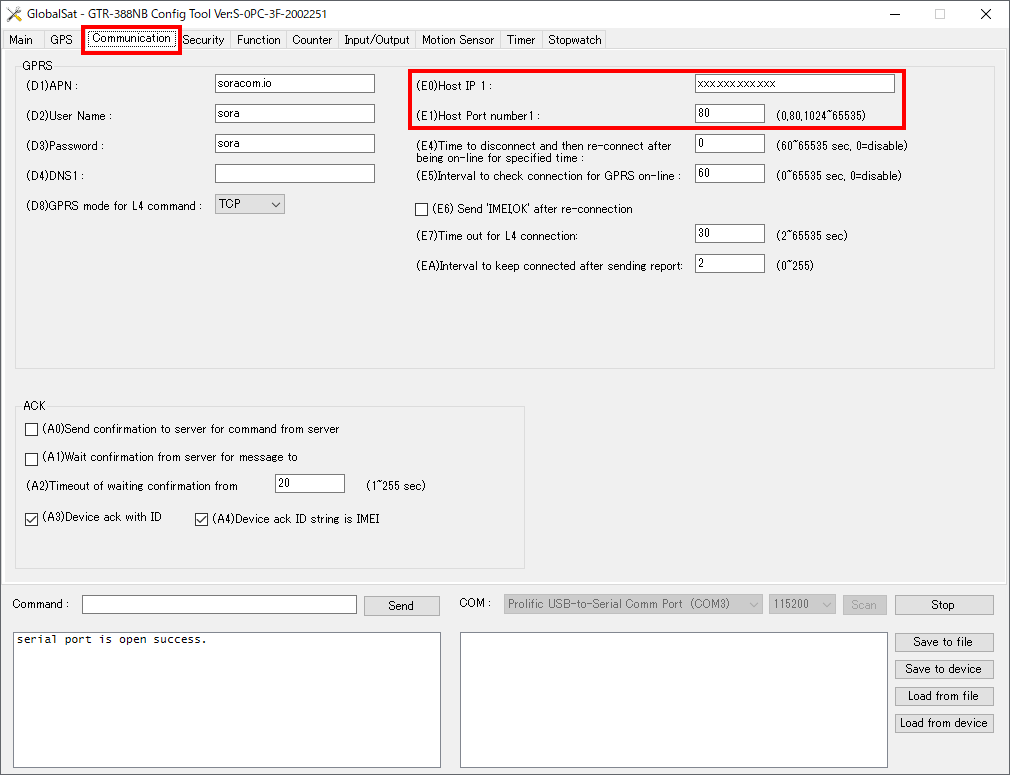
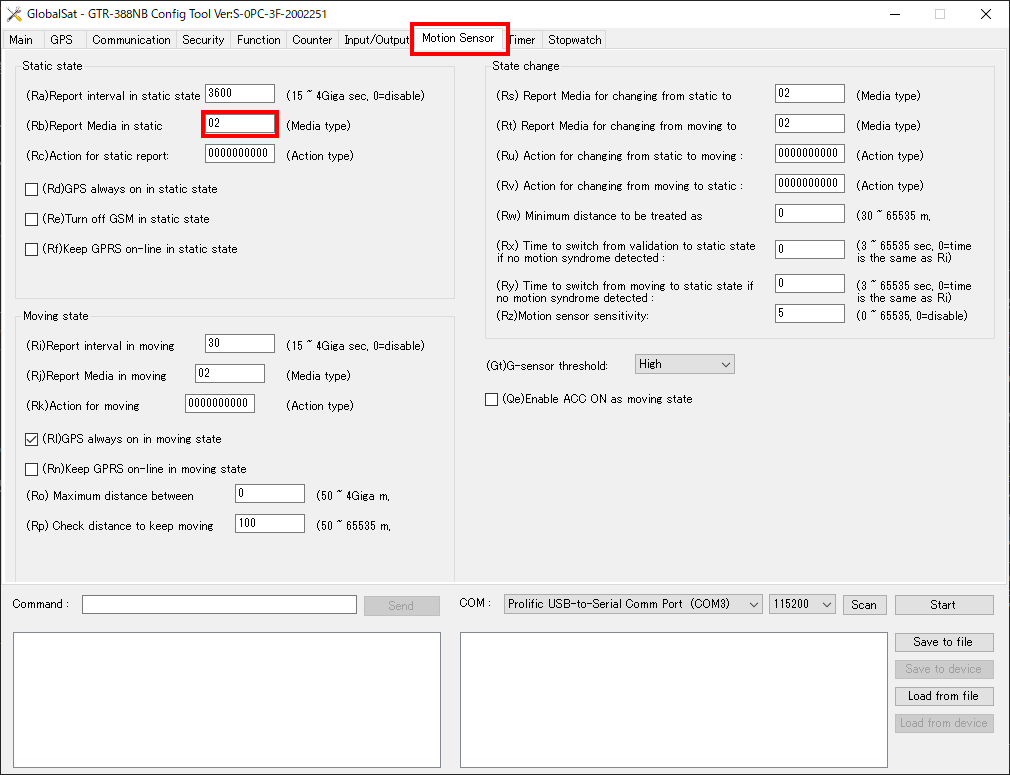
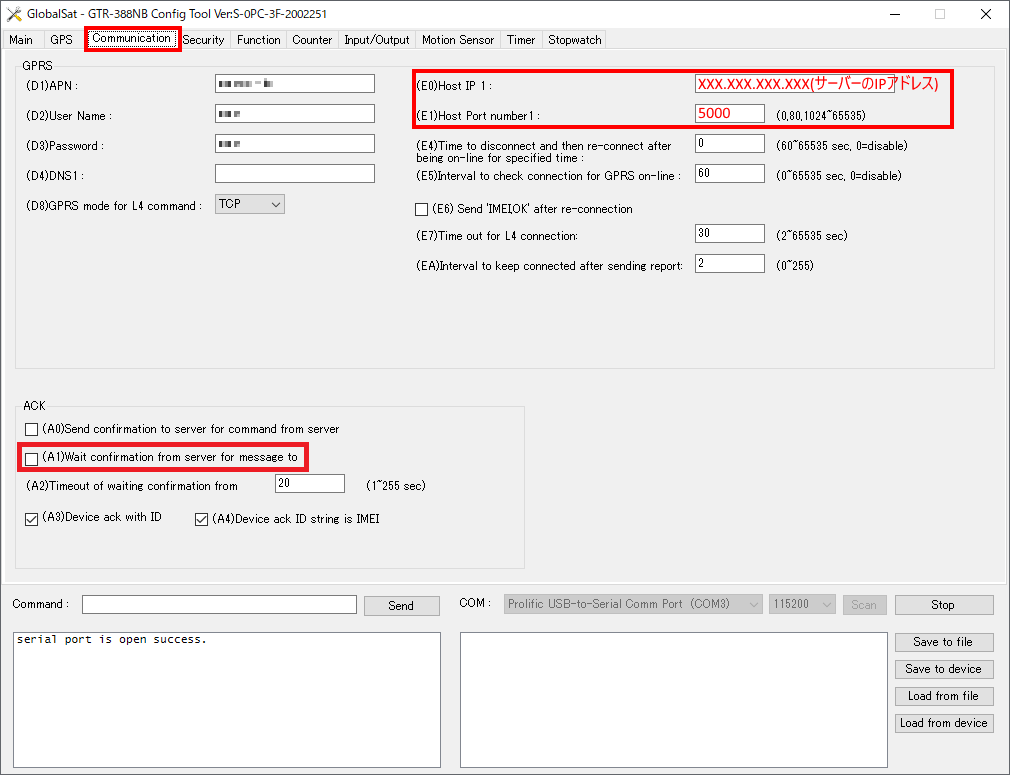
さて、車のエンジンのオン・オフに連動させる場合、次の画面の設定となります。
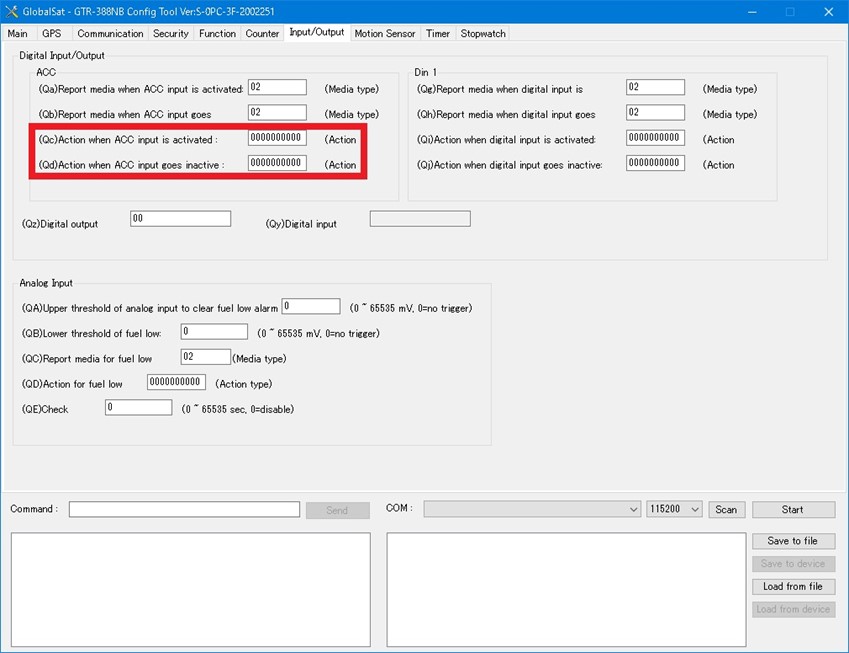
赤枠で囲った部分の設定を変更します
赤枠の記載は次の通りです。
(Qc)Action when ACC input is activated:
→ACC入力時の動作
(Qd)Action when ACC input goes inactive:
→ACC入力が無効になった場合の動作
つまり、Qcが「エンジンがオン(給電が開始)になったとき」、Qdが「エンジンがオフ(給電が終了)になったとき」の動作となります。
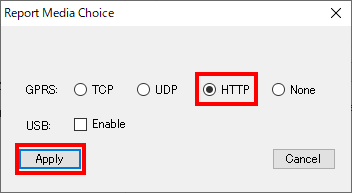
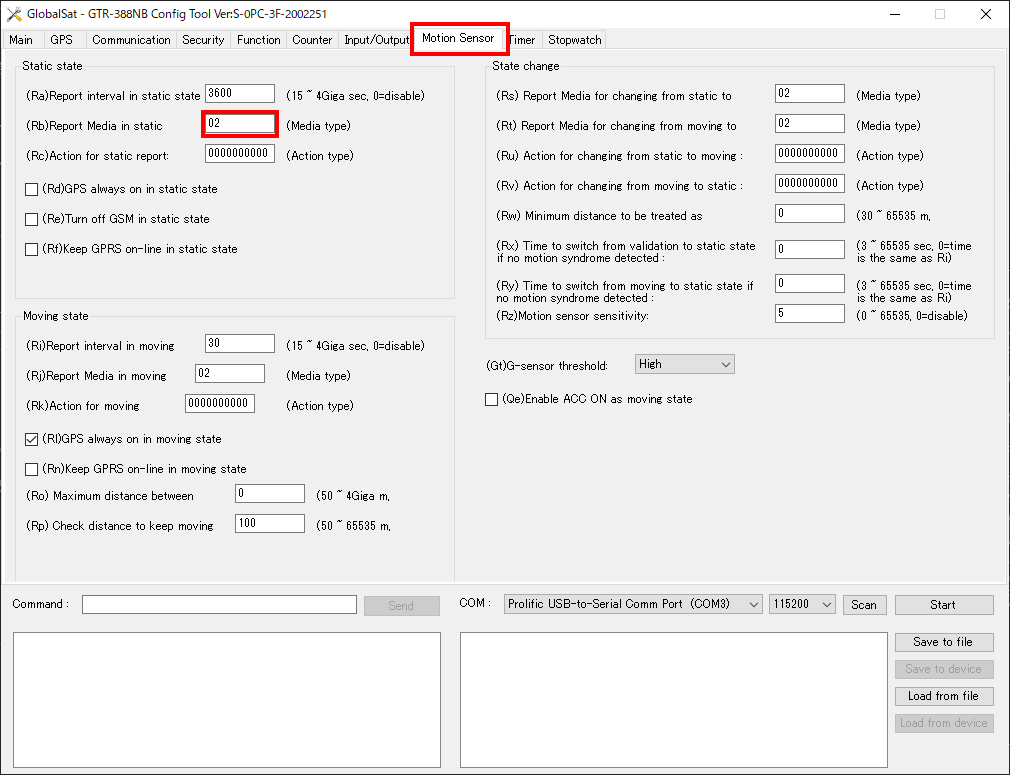
Qc、Qdの入力部分(0000000000というところ)をクリックすると、次の画面が表示されます。赤枠の部分を変更します。
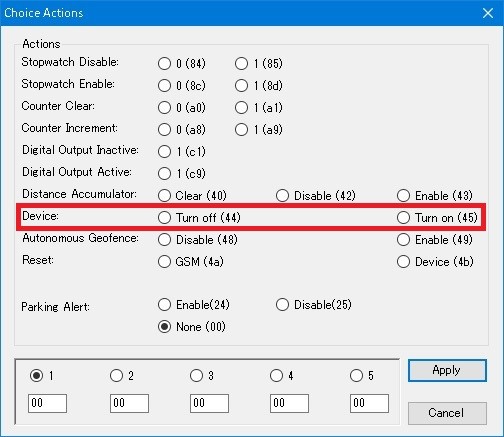
入力部分をクリックすると上記の画面が表示されます
赤枠の記載は次の通りです。
Device ○ Turn off (44) ○ Turn on (45)
これは、端末の電源をオフ(44)にするのと、オン(45)にするのを選べるということです。先程のQc「エンジンがオンになったとき」は、端末の電源もオンにしたいので45を選択します。逆にQd「エンジンがオフになったとき」は、端末の電源もオフにしたいので44を選択します。入力が完了すると次のようになります。

これで設定は完了です!
それでは、実際に車を走らせて挙動を確認してみます。
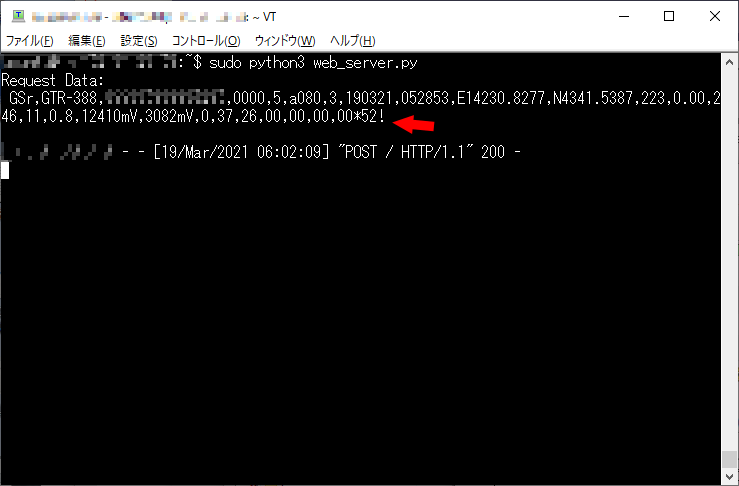
比較のため、上記の設定(Qc、Qd)を行っていない端末でのテスト結果を掲載します。
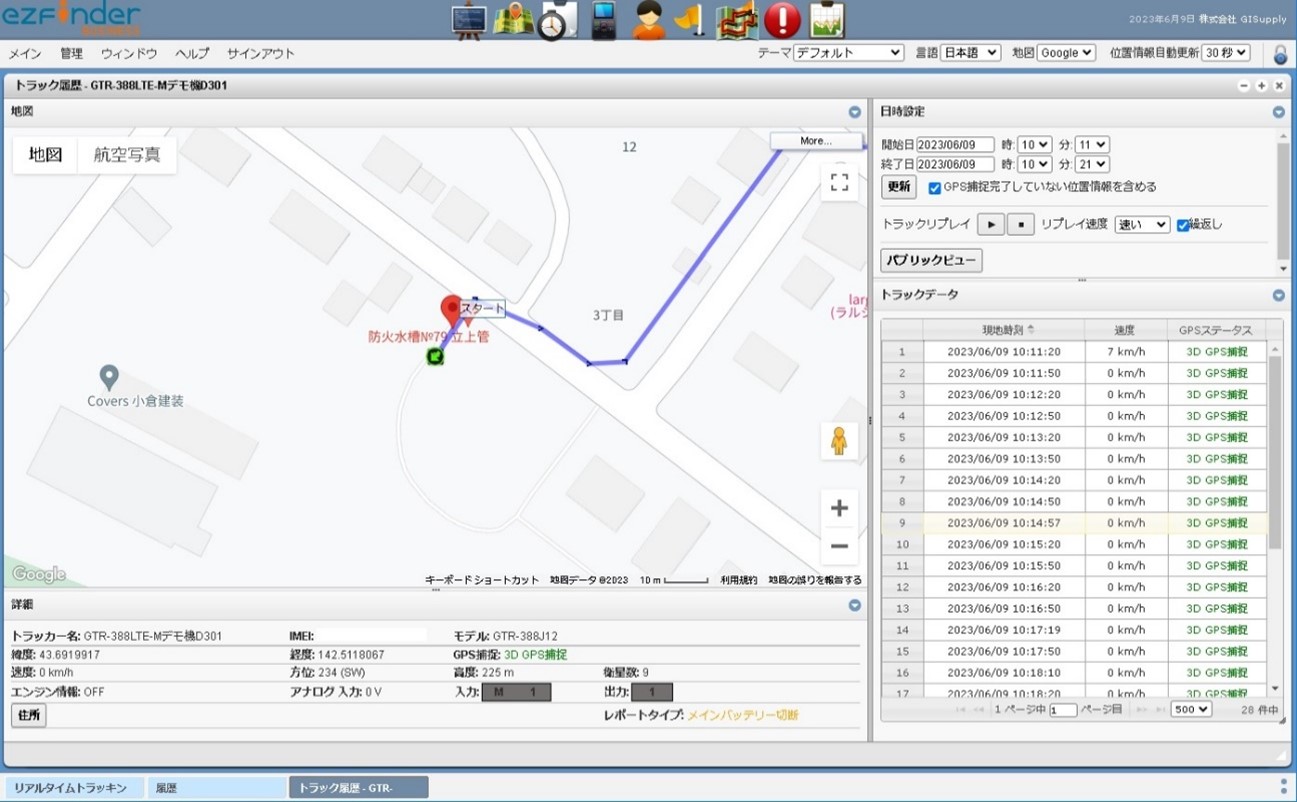
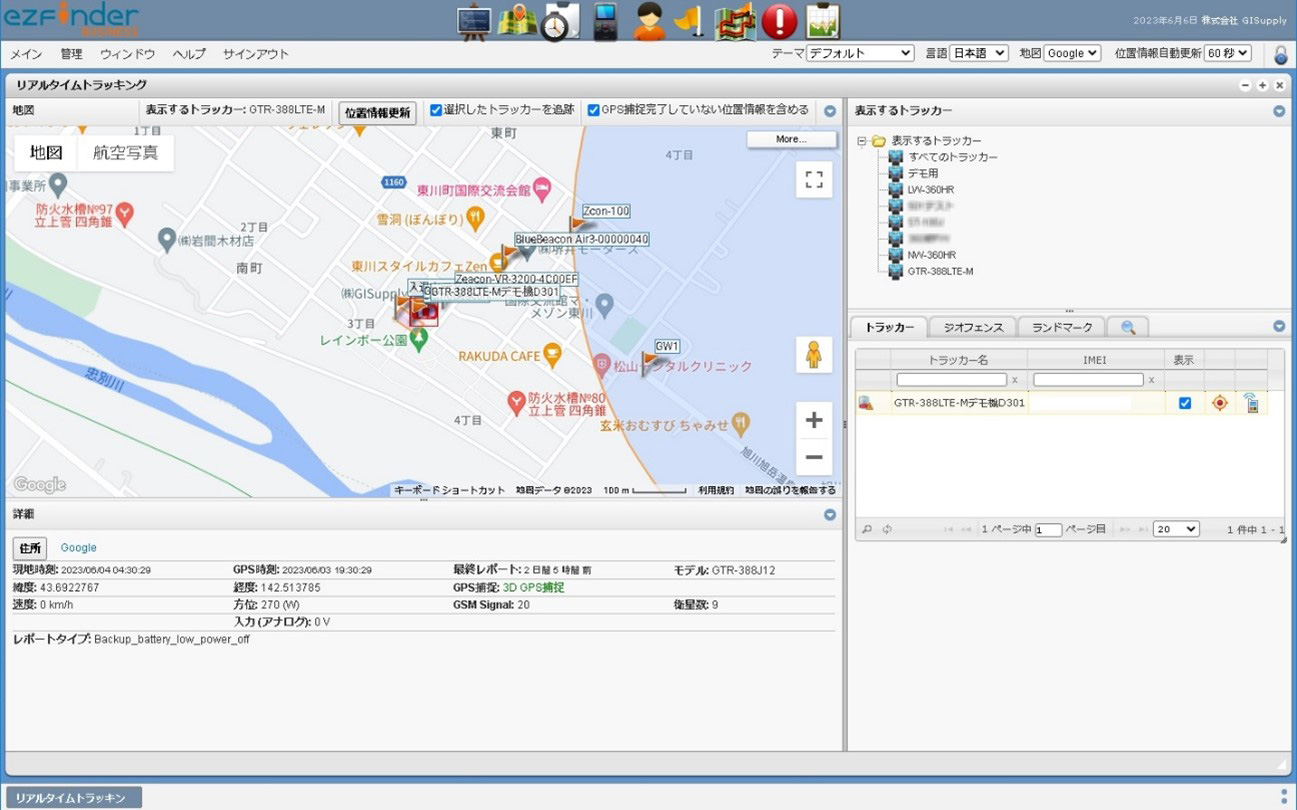
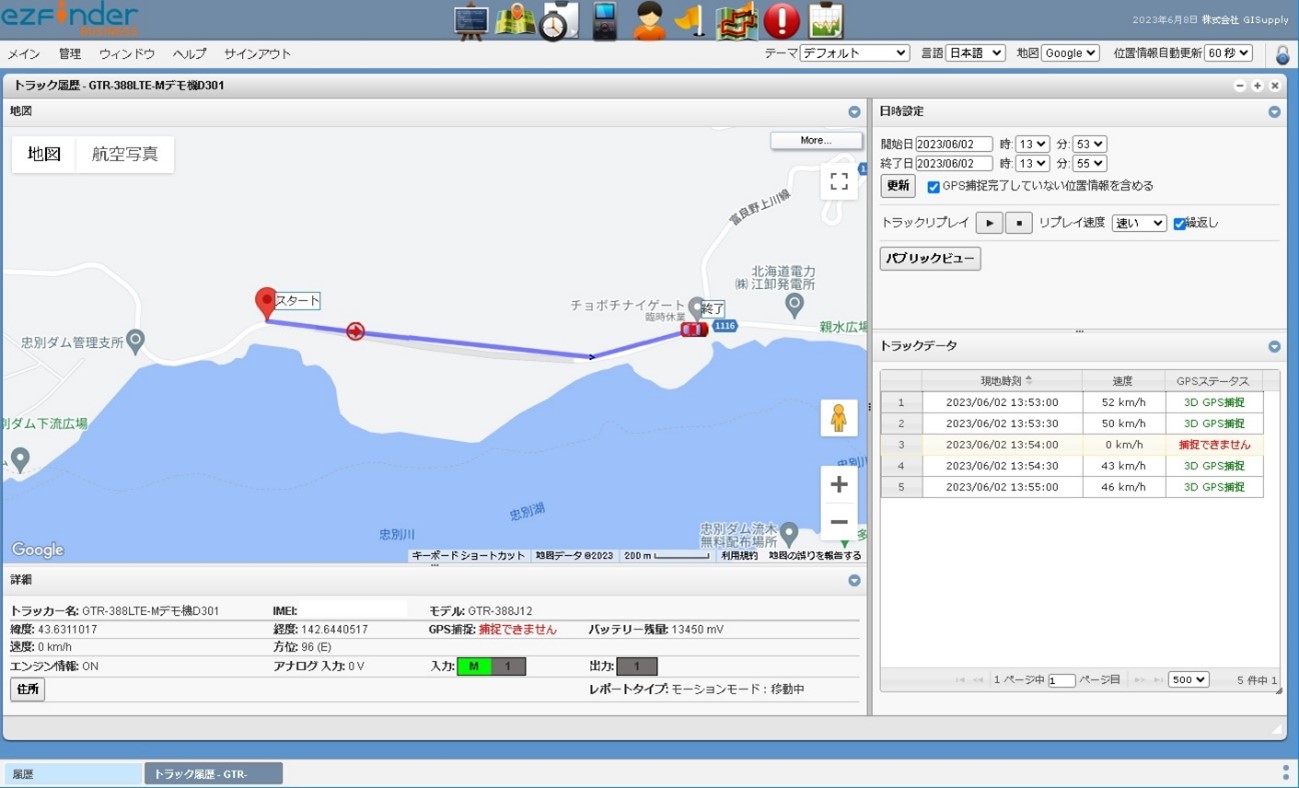
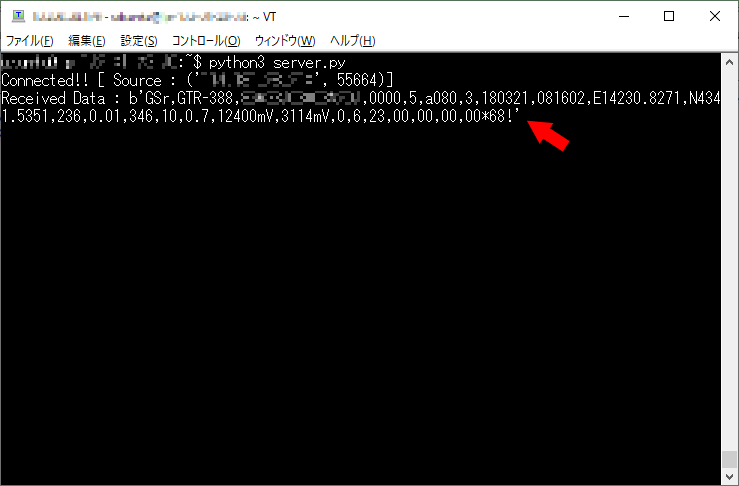
Qc、Qdの設定を行わなかった場合の挙動
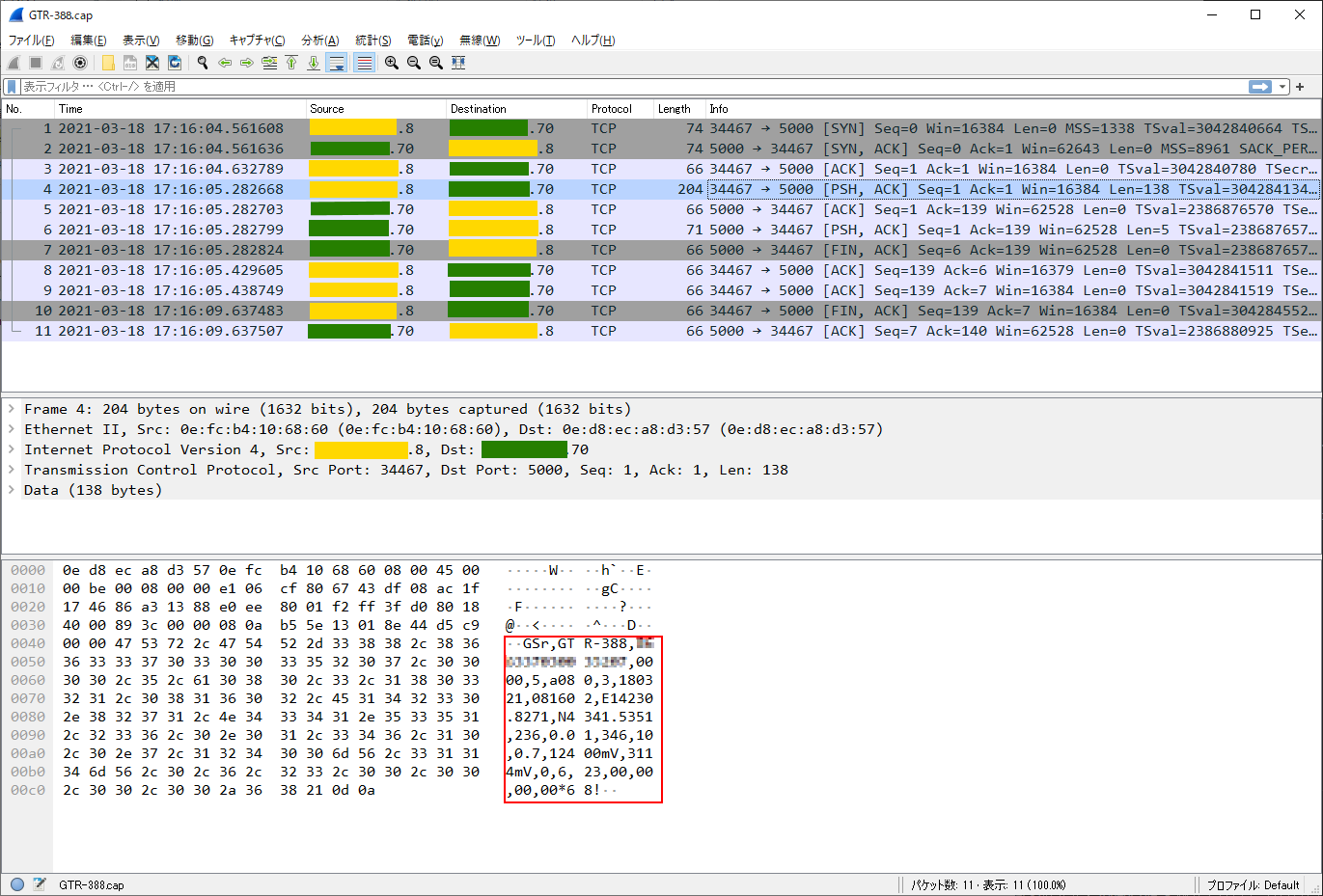
車を駐車場に停め、少ししてからエンジンを切りました。今回は、静止時、移動時ともレポート間隔は30秒に設定しています。また、シガーソケットから給電しています。エンジンをオフにすると、画像のように「レポートタイプ:メインバッテリー切断」「エンジン情報:OFF」と表示されます。しかし、その後も30秒おきに位置情報が送信されてきています。「エンジンはオフになったけれど、GTR-388LTE-Mはオフになっていない」ということになります。
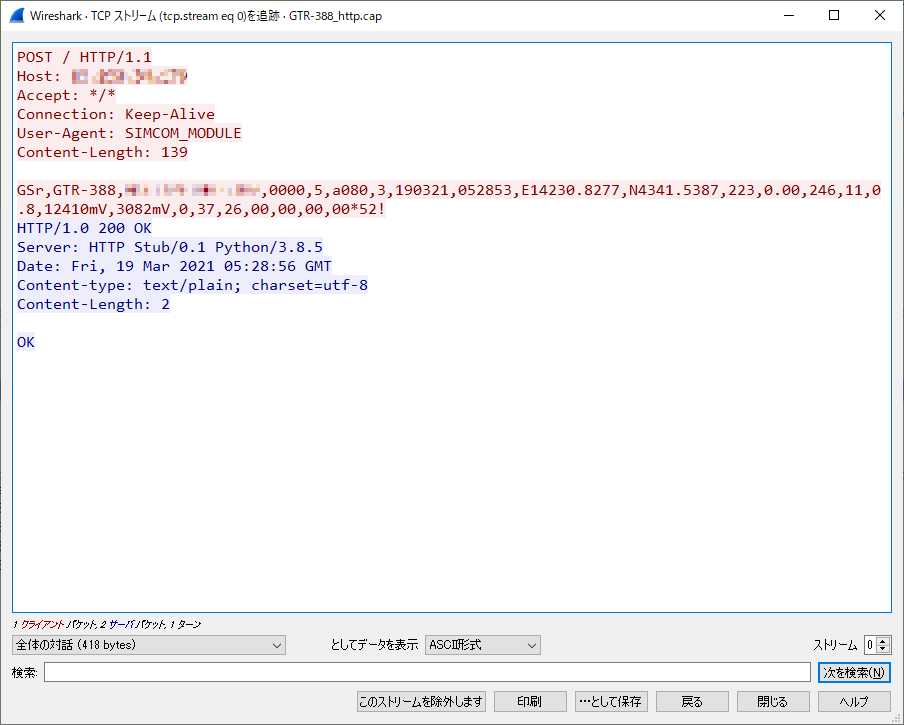
続いて、Qc、Qdの設定を行った端末の挙動を見てみます。
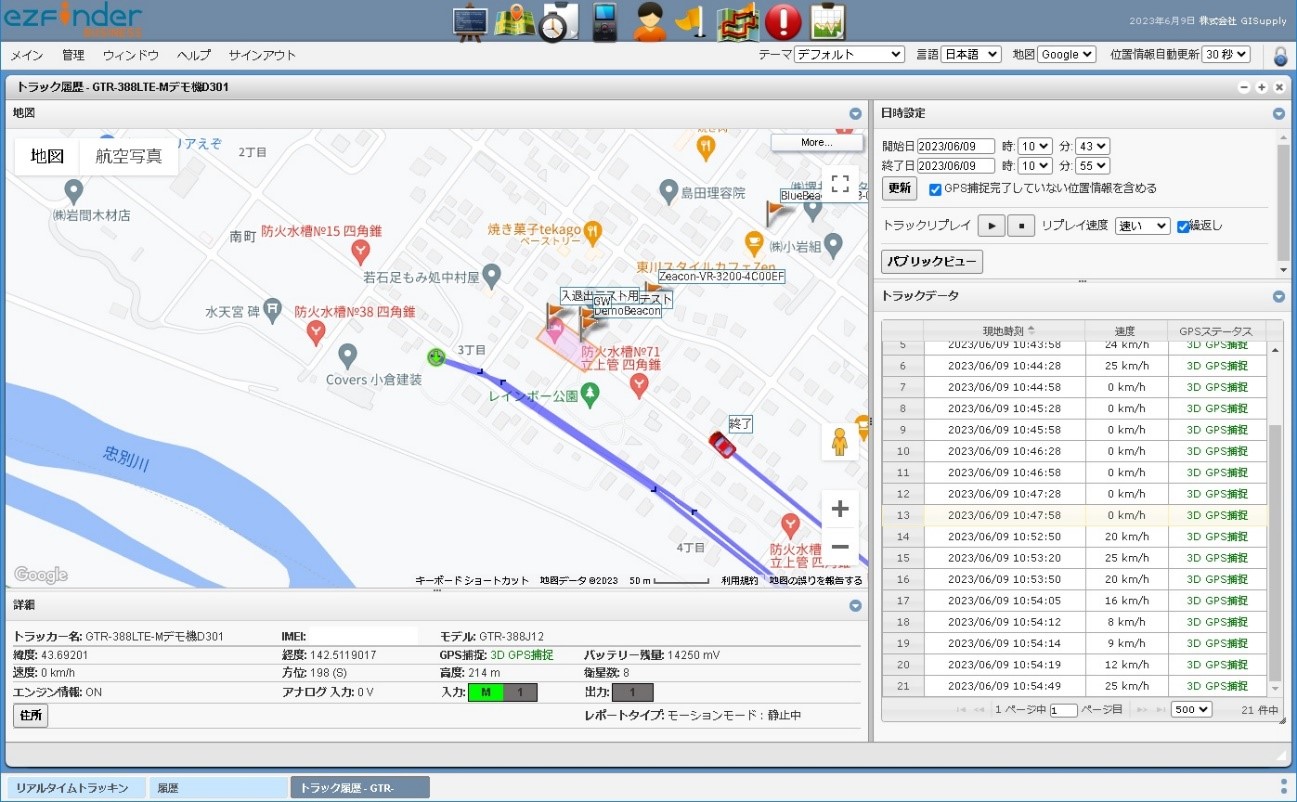
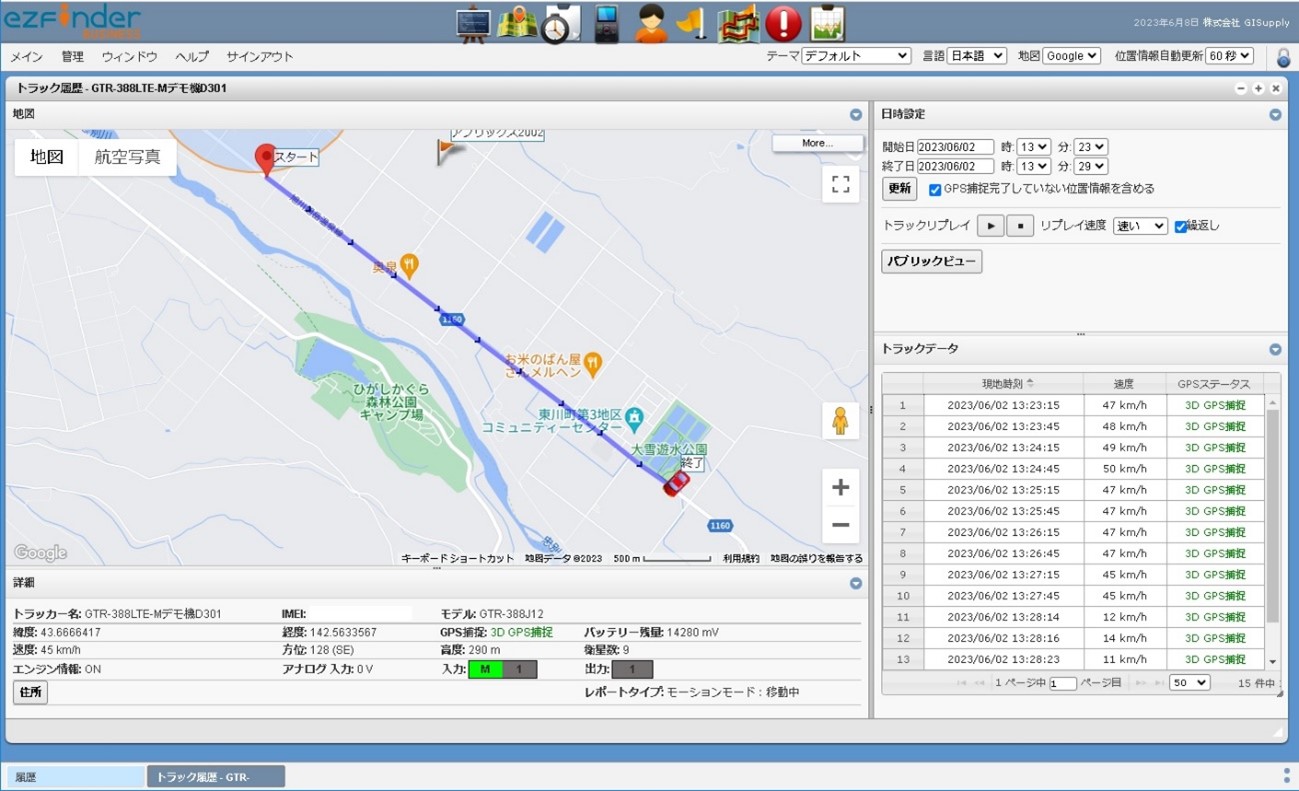
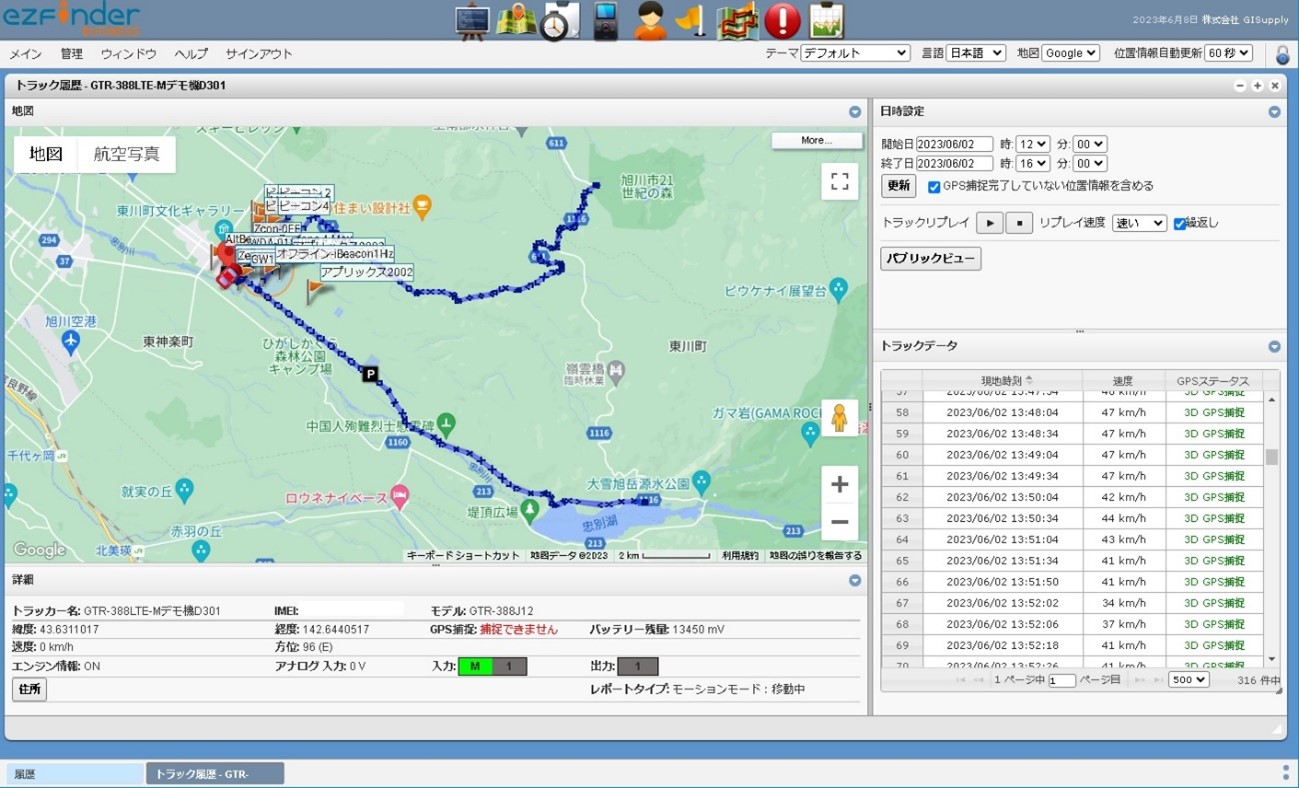
Qc、Qdの設定を行った場合の挙動
10時48分にエンジンをオフにし、10時52分にエンジンをオンにしました。ezFinder BUSINESS上では10:47:58のレポートで途切れ、再開は10:52:50となっています。つまり、エンジンをオフにしたときにGTR-388LTE-Mの電源もオフになり、エンジンをオンにしたときにGTR-388LTE-Mの電源もオンになったということになります。
以上をまとめますと、
車のエンジンのオン・オフに連動させて、GTR-388LTE-Mの電源もオン・オフできる!
という結果となりました。
この「エンジンに連動させる」という機能、車両管理などの際には特に重要です。この機能がないとエンジンがオフでもデータを送り続けることになり、データ量の増大に伴ってデータが見づらくなったり、通信量が増えたりします。「エンジンの連動」はezToolでは行うことができませんので、ご希望の方は弊社までお問い合わせください。また「こういったことはできるのか?」といった疑問がございましたら、ぜひご連絡ください。
最後までお読みいただきありがとうございました!