Kerlink社のSPNが 2024/9/30 をもってサポート終了となり、内蔵ネットワークサーバーの代替として今後は
・ChirpStack
・Actility TAO
2種からお選びいただくこととなります。
→【Kerlink社のSPN提供、サポート終了に関する詳細はこちら】
そもそもLoRaで言う所のネットワークサーバーとは、各デバイスの情報をゲートウェイから受取り、ログ表示や別サーバーへとデータを転送出来るサーバーのことです。
TTSやAWS等のその他多くのネットワーク上で構成されているサーバーとは違い、SPNと今回の代替サーバーは内蔵となっているため同じネットワーク内にいなければゲートウェイに接続することが出来ず、手間の反面セキュリティが強いとも言えます。
また、定額制や従量制が多い中でSPNはKerlink社ゲートウェイに対して無償の提供だったこともあり過去多くインストールされてきました。
では現在使っているSPNはどうなるのか?という話ですが、ライセンス発行済みで既に導入されているお客様は引き続き利用可能ですので”変更しませんか?”と無理に弊社から連絡をすることはありません。
不具合の発生についてはサポート対象外とはなりますが、再インストールのみ対応可能です。
しかし、SPNのセキュリティやLoRaWAN仕様は古く、不具合(最初のアップリンクにsend dataでダウンリンクは送れない等)も残っているので、代替ネットワークサーバーへの乗り換えも視野に入れたほうが良いかもしれません。
下記でご紹介する2種類の代替ネットワークサーバーもSPN同様内蔵になっており、SPNと同等またはそれ以上の使い方をすることが可能です。
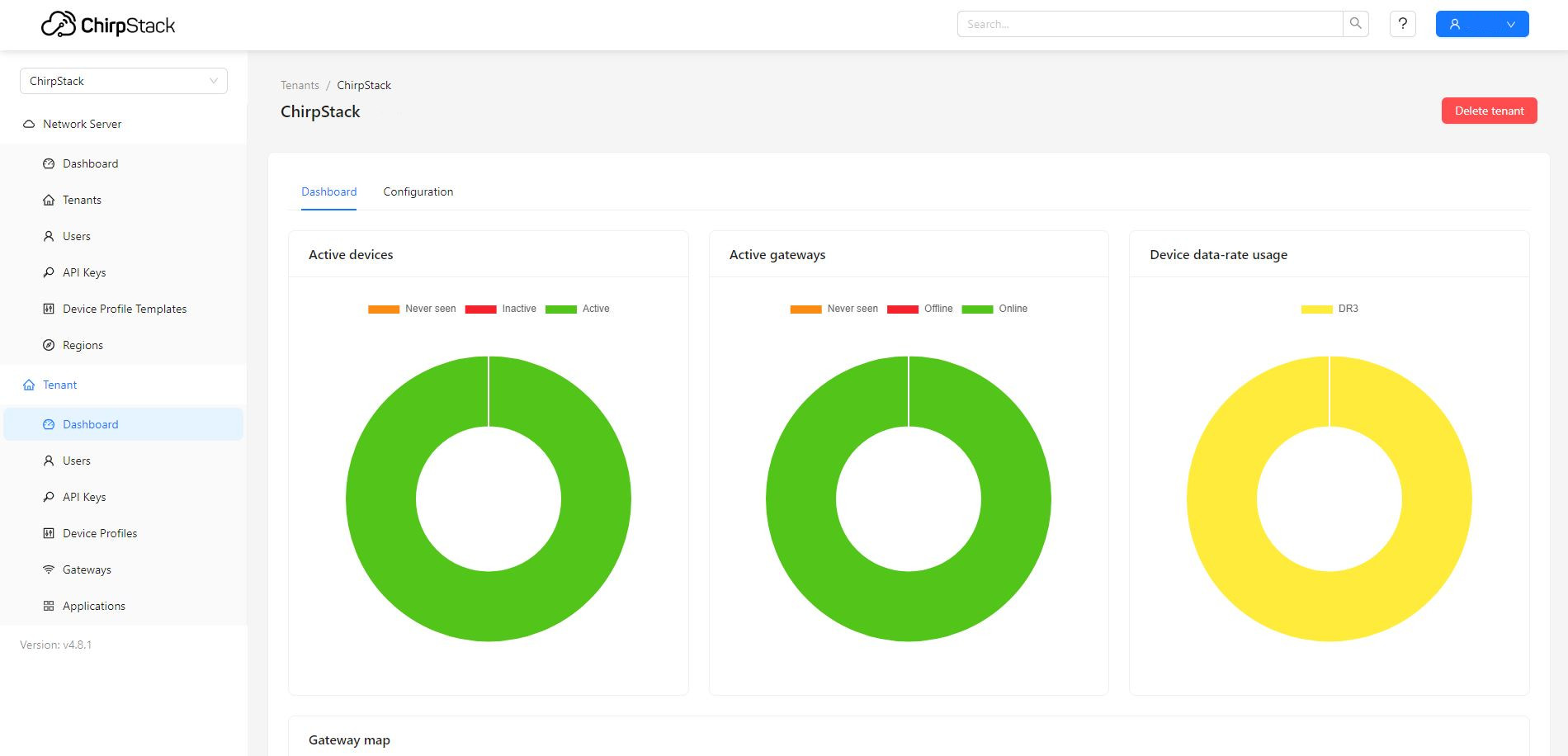
■ ChirpStack
[メリット]
・インストール無償
・デバイスをグループ毎に分けて転送先を設定可能
・アップリンク、ダウンリンクはページ上でリアルタイムに反映するのでページ更新の必要無し
・オープンソースのため、利用者&情報量が多い
・PostgreSQL、Node-RED、HTTP REST API等の追加インストールが可能
※Chirpstack、PostgreSQL、Node-RED、HTTP REST APIの動作についてはメーカーサポート対象外となります
[デメリット]
・プロファイル(OTAA or ABP、Region、MAC version等)を自分で作成する必要有
・若干複雑なGUI
・受信ログを見られるのは送受信含めて10件まで
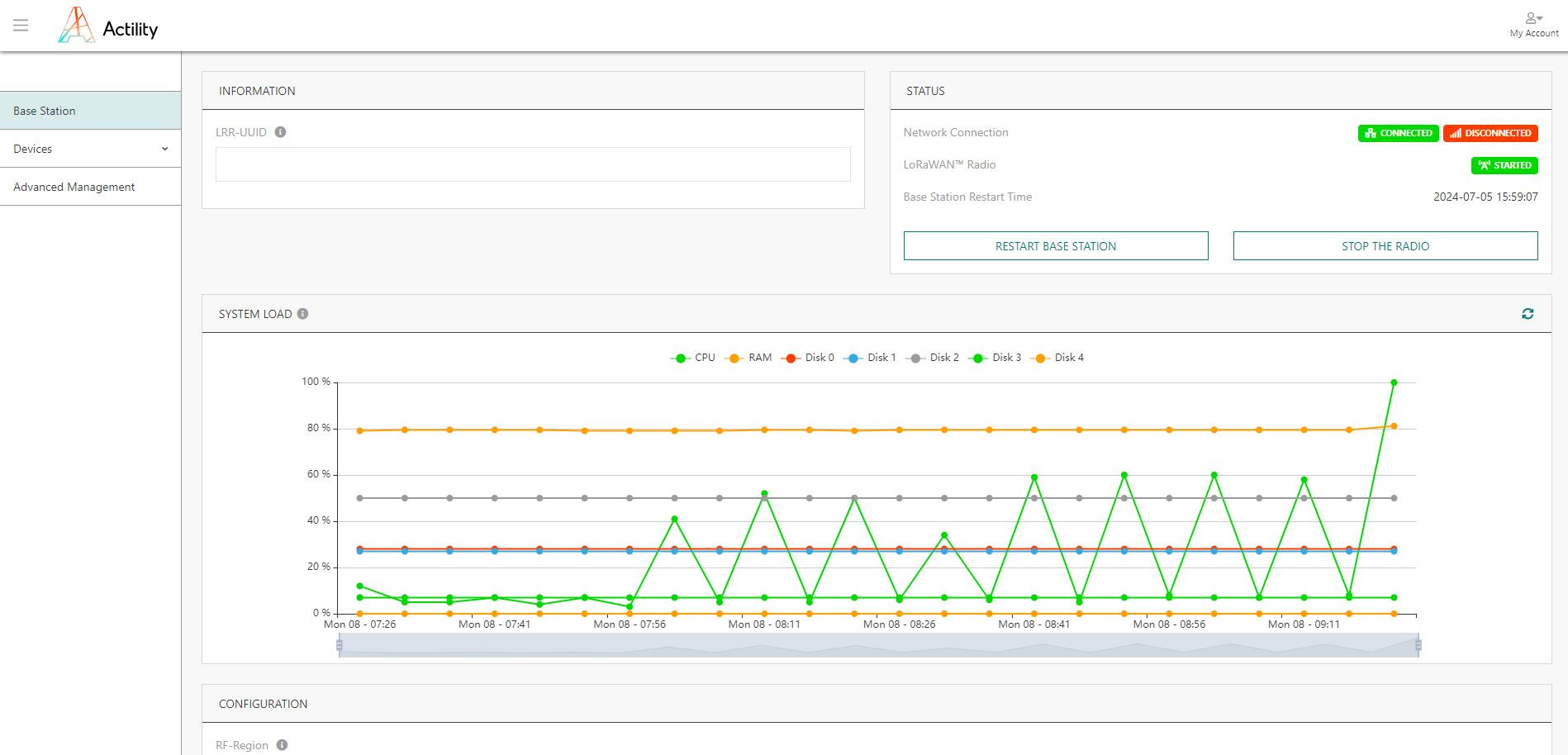
■ Actility TAO
[メリット]
・シンプルでわかりやすいGUI
・デバイスリストが用意されているので、デバイス登録が簡単(デバイスリストに無い機種ももちろん登録可)
・メーカーによる1年間の動作サポート
[デメリット]
・インストール有償(買い切り)
・転送先、ダウンリンクコマンド送信はActility TAO外で設定必須(Node-RED等)
・受信ログを見られるのは送受信含めて10件まで
・最新の受信データ確認にはページ更新が必要
簡単にまとめると、
ChirpStack:自由度は高いが若干複雑
Actility TAO:シンプルでわかりやすいが自由度が少し低い
というのがどちらも実際に機器を接続し、検証した感想です。
ChirpStack、Actility TAOともに受信ログが10件までとSPNに劣る点はありますが、どちらも、最新のLoRaWAN仕様に準拠し多数のインターフェース(MQTT、 HTTP、 Websocket、 Modbus、 BACNet、 PostgreSQL…等)に対応している上位互換です。
また、SPNと代替ネットワークサーバーでは転送先に対する形式が異なるため、すでにアプリケーションサーバーにSPNから転送を行っている方は代替ネットワークサーバーに切り替えた際に再構築が必要になります。
ただ、Node-REDでSPNと同様の形式となるような設定は可能です。
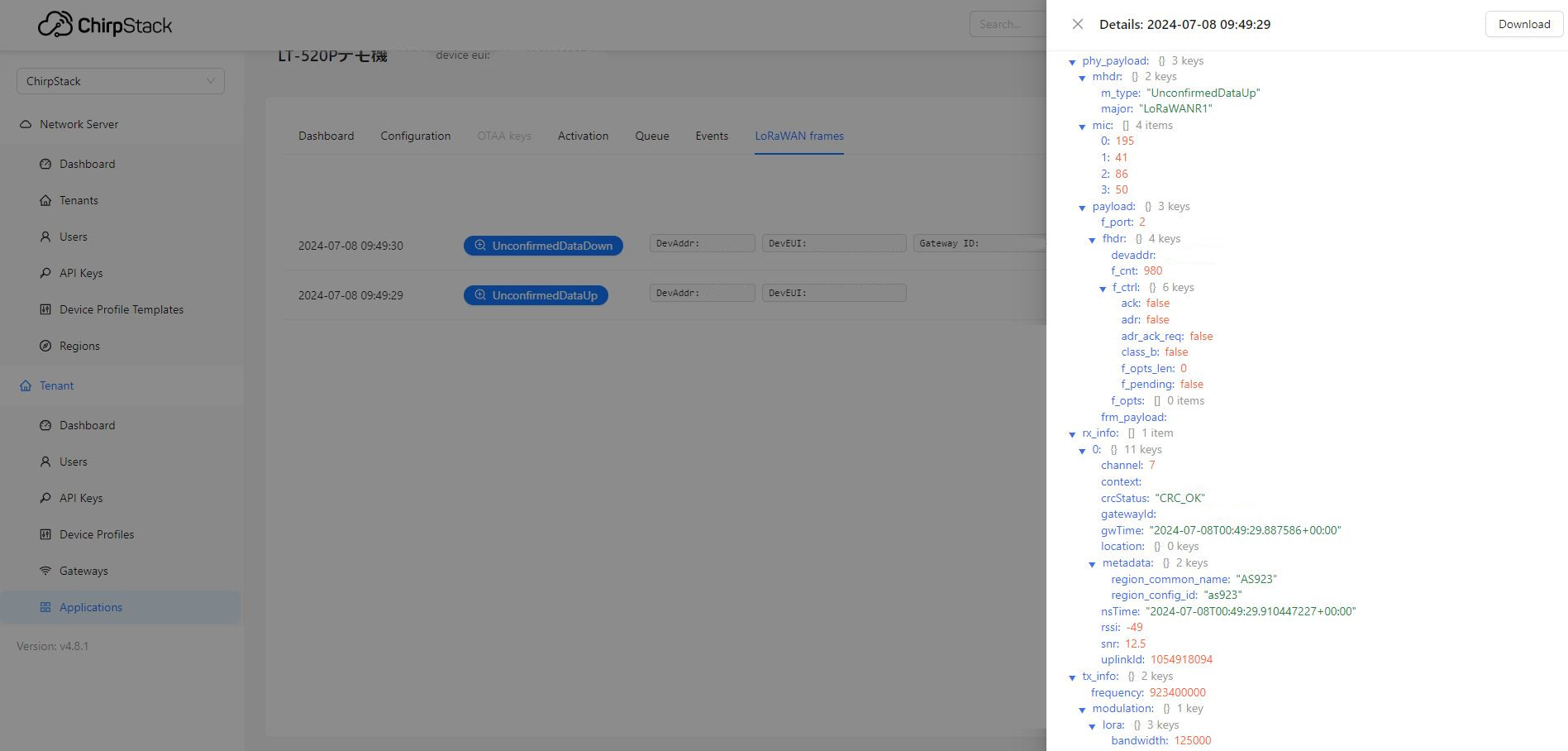
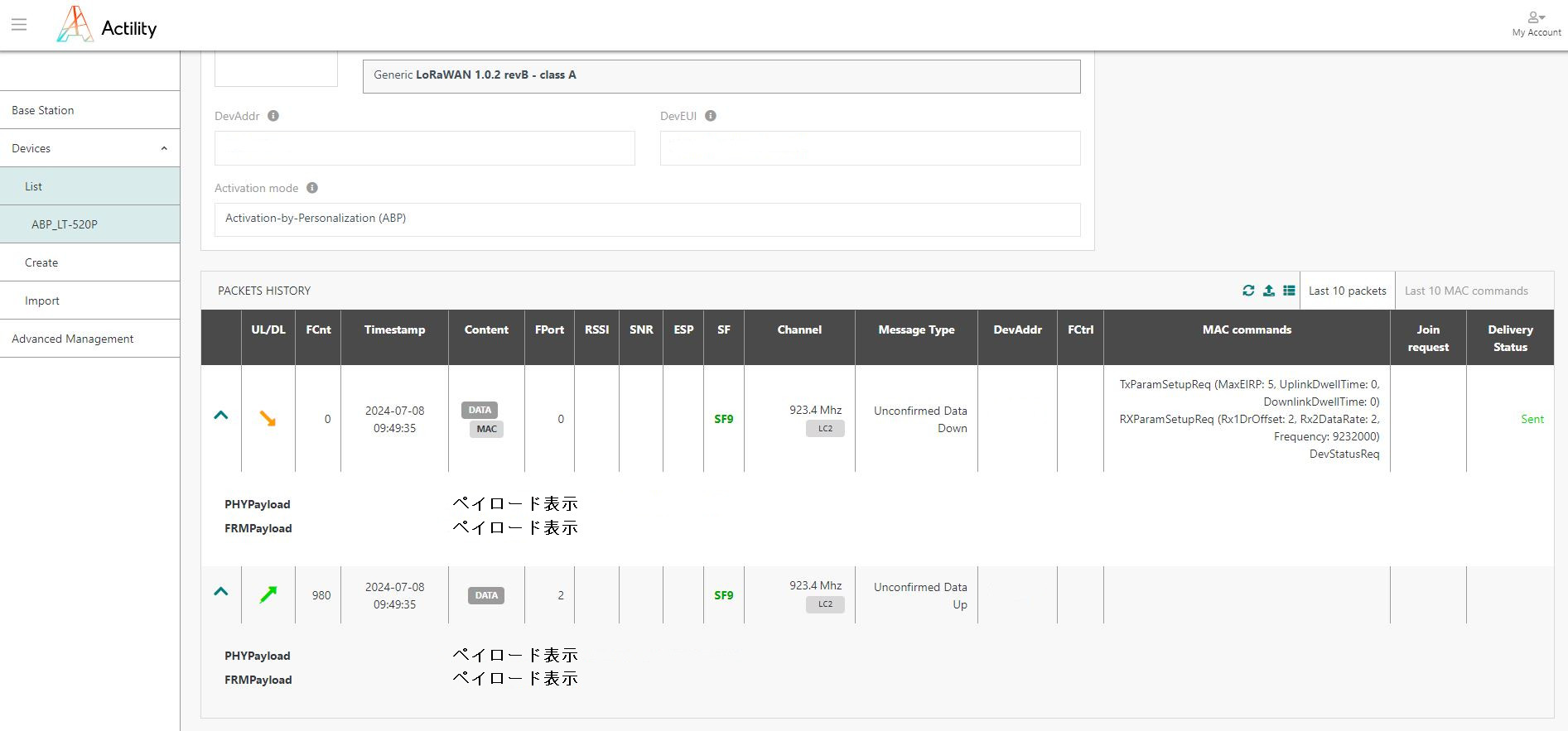
最後に、ABPで同じ端末を登録して受信したデータの表示を並べてみました。
(一部表示は加工で消去しています)
■ ChirpStack
■ Actility TAO
ゲートウェイご購入や、SPNからの移行にお悩みの方はぜひご相談ください!